![]()
SwarmFlow
An efficient drone formation optimizer that uses the Hungarian Algorithm to solve the assignment problem for grid and circular formations. The project minimizes total drone movement, enabling fast, optimized, and scalable swarm repositioning.
The problem it solves
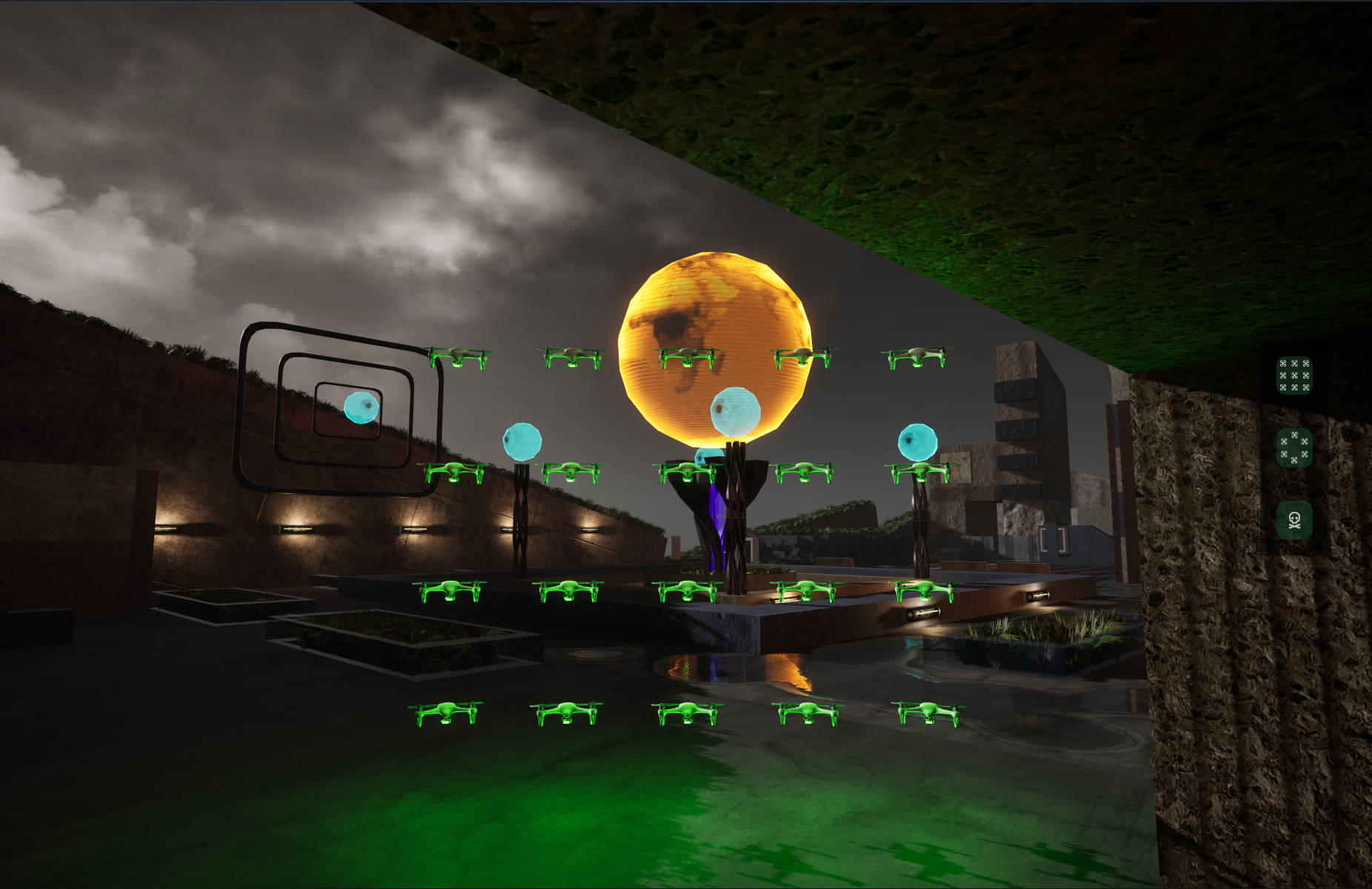
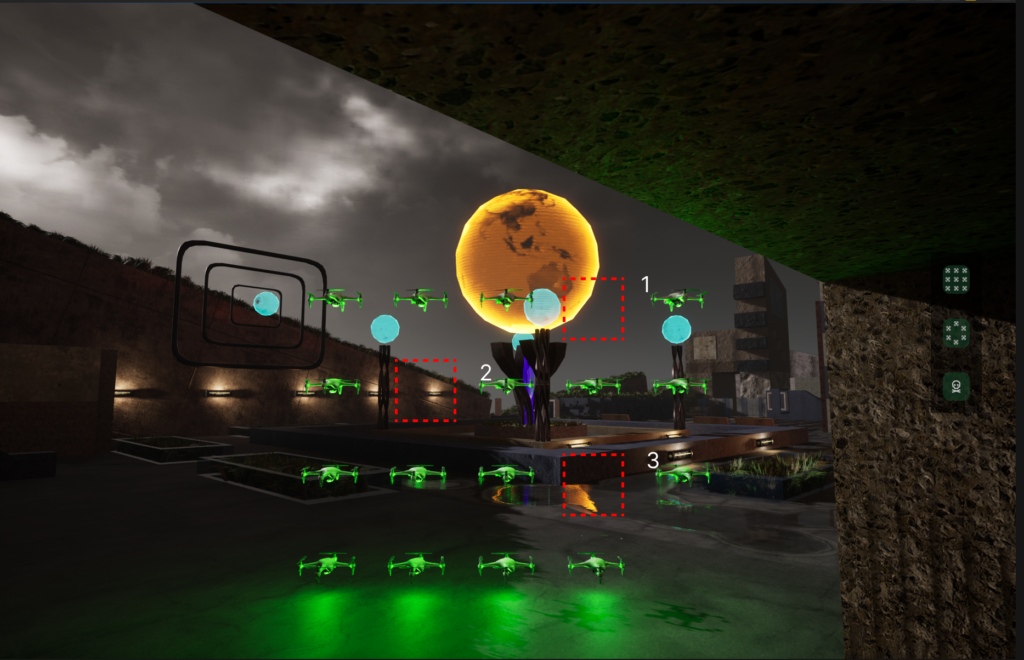
A client approached me with an interesting challenge: creating a VR simulator where users could shoot drones from a swarm, forcing the remaining drones to dynamically regroup and reform their original shape.
While this may seem straightforward, efficiently reorganizing a swarm after drones are removed is a complex optimization problem. Each remaining drone must be assigned a new position in the formation while minimizing unnecessary movement.
To solve this, I used the Hungarian Algorithm to optimally map the available drones to a set of desired positions. This approach minimizes total travel distance and enables the swarm to quickly reorganize into different formations, such as grids or circles, in a smooth and efficient manner.
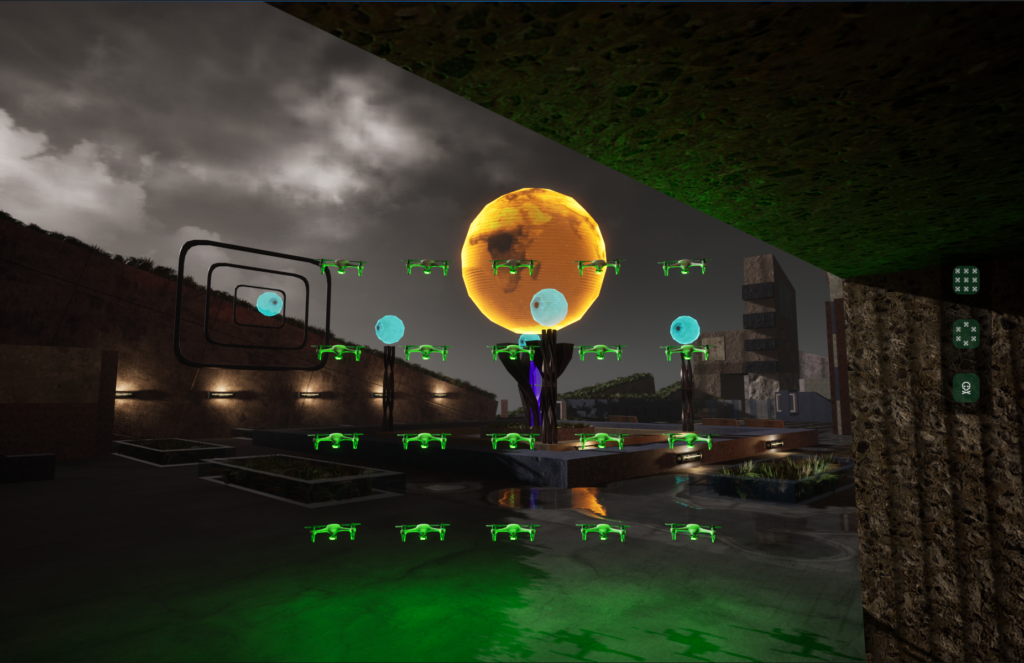
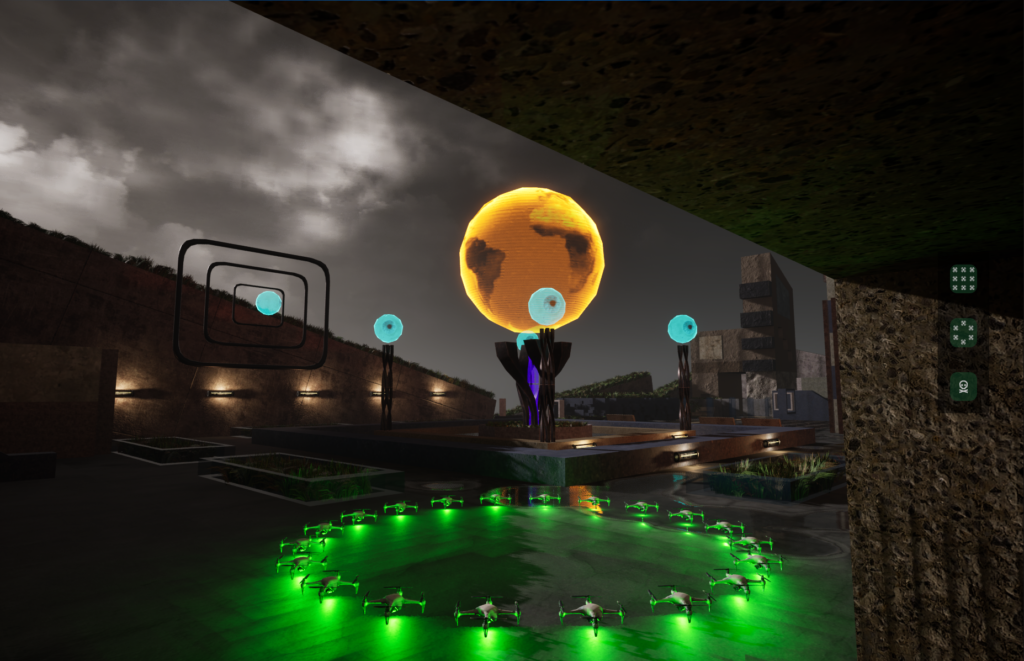
Formations
The system is not limited to predefined layouts. By defining a set of target positions, it can generate and reorganize drones into virtually any formation shape. Below are two simple examples, a grid and a circle, but the same approach can be extended to custom patterns, logos, text, or any arbitrary arrangement.